
线性代数
特征值和特征向量
什么是特征值和特征向量
行列式本质上是方阵的一个属性, 而特征值和特征向量也是方阵的一个属性. 其中的**”特征”描述的就是方阵的”特征”**, 更加准确的说对于一个矩阵既可以理解成变换又可以理解成空间,所谓的理解成空间是因为一个矩阵可以表示空间的基.
而特征值和特征向量更主要的是从变换的视角看方阵,当我们把方阵理解成一个变换,这个变换拥有一些特征. 这些特征将被特征值和特征向量表示出来.
具体看一个例子:
$$
A=\begin{pmatrix}
4 & -2\
1 & 1
\end{pmatrix}\
\begin{pmatrix}
4 & -2\
1 & 1
\end{pmatrix}\begin{pmatrix}
1\
4
\end{pmatrix}=\begin{pmatrix}
-4\
5
\end{pmatrix}
$$
这个矩阵A可以理解为表示二维空间的一组基$(4,1)^T,(-2,1)^T$, 也可理解为这个基对应坐标系的坐标转换矩阵,可以将二维平面的一个点转换到另外一个位置,比如上面将(1,4)转换到(-4,5).
这个变换过程中我们比较关心一些特殊的向量:
$$
\begin{pmatrix}
4 & -2\
1 & 1
\end{pmatrix}\begin{pmatrix}
2\
2
\end{pmatrix}=\begin{pmatrix}
4\
4
\end{pmatrix} \
$$
$$
\begin{pmatrix}
4 & -2\
1 & 1
\end{pmatrix}\begin{pmatrix}
2\
1
\end{pmatrix}=\begin{pmatrix}
6\
3
\end{pmatrix}
$$
这些向量通过矩阵A转换后,方向没有改变,结果是原来的常数倍.
用数学式子表达:
$$
A\vec{u}=\lambda\vec{u}
$$
其中$\lambda$ 称为A的特征值(eigenvalue) ,$\vec{u}$ 称为A对应于$\lambda$ 的特征向量eigenvector .
具体有什么用? 后续可见
如何求解特征值和特征向量?观察上面式子,可知零向量肯定满足,是平凡解.
所以特征向量不考虑零向量. 但$\lambda=0$ 并不平凡,$A\vec{u}=0$ ,此时是一个齐次方程组是有非零解的. A可逆就只有零解,此时希望$\vec{u}$ 有非零解,这个A不可逆,所以如果$\lambda=0$ 是矩阵A的一个特征值,就说明A不可逆,反映了A的特征,并不是任意一个矩阵其特征值都可以为0. 所以特征值可以为0.
$$
(A-\lambda I)\vec{u}=0\ 希望该方程有非零解,因此有\
det(A-\lambda I)=0 \quad 特征方程
$$
因此转换为了一个行列式的问题,行列式是求特征值和特征向量的基础. 这个方程也称为特征方程.
$$
|A-\lambda I|=
\left|
\begin{array}{ccc}
4-\lambda &-2 \
1&1-\lambda \
\end{array}
\right|\=\lambda^2-5\lambda+6\=(\lambda-2)(\lambda-3)=0\
\lambda_1=2,\lambda_2=3\
\lambda_1=2,(A-2I)\vec{u}=0\
\downarrow\
\vec{u}=(1\quad 1)^Ts \
\lambda_2=3,(A-3I)\vec{u}=0\
\downarrow\
\vec{u}=(2\quad 1)^Ts
$$
至此矩阵A的特征值以及对应的特征向量求出来了.
对应一个$\lambda$ 特征值的特征向量不止一个,而是一组,即无数个. 如果u是A对应$\lambda$ 的一个特征向量,则ku也是一个特征向量. $k\ne0$
特征向量组成了$A-\lambda I$ 零空间,刨除零向量.
$$
E_\lambda ={O}\cup{\lambda 的特征向量}
$$
$E_\lambda$ 称为$\lambda$ 对应的特征空间.
特征值和特征向量的性质
通过上面的讲解可知,对于方阵A:
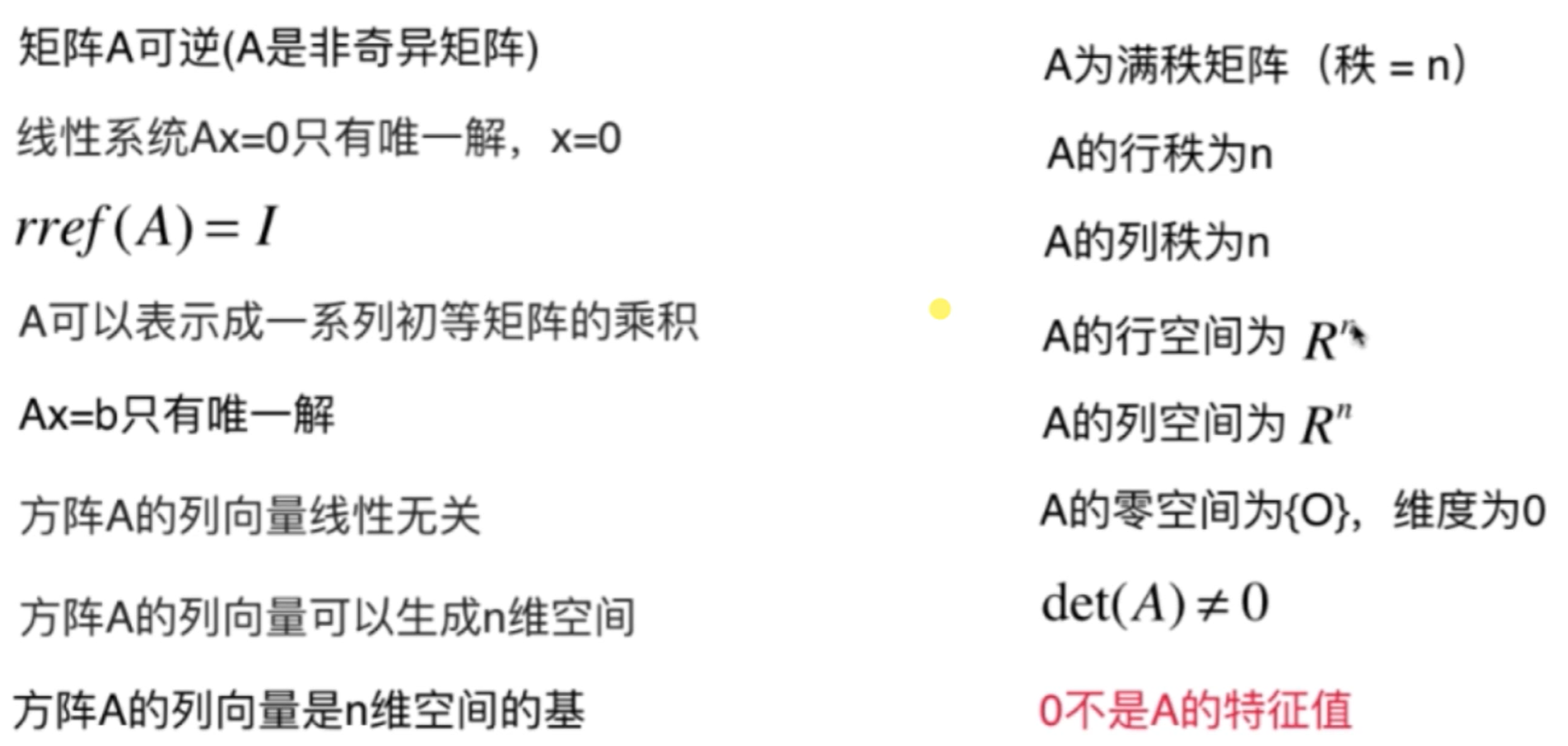
多了新的一条等价命题,如果A可逆,则0不是A的特征值.
性质1:对角矩阵(上三角、下三角)的特征值是其对角线上的元素.(证明略)
性质2:若$\lambda$ 是A的特征值,则$\lambda ^m$ 是$A^m$ 的特征值. (取-1也成立 )
$$
数学归纳法:m=1成立,A\vec{u}=\lambda\vec{u}\
假设m=k成立,A^k\vec{u}=\lambda^k\vec{u}\
当m=k+1时,A^{k+1}\vec{u}=A.A^k\vec{u}\=\lambda^kA\vec{u}\
=\lambda^k\lambda\vec{u}\=\lambda^{k+1}\vec{u}
$$
推论:若$\lambda$ 是A的特征值,则$\lambda ^{-1}$ 是$A^{-1}$ 的特征值.
$$
已知A\vec{u}=\lambda\vec{u}\
A^{-1}A\vec{u}=A^{-1}\lambda\vec{u}\
\vec{u}=A^{-1}\lambda\vec{u}\
A^{-1}\vec{u}=\lambda^{-1}\vec{u}
$$
性质3:如果矩阵A含有两个不同的特征值,则他们对应的特征向量线性无关.
$$
A\vec{u}=\lambda_1\vec{u} \quad A\vec{v}=\lambda_2\vec{v}\
反证法:假设线性相关\
\vec{u}=k\vec{v},k\ne0 \
A\vec{u}=A(k\vec{v})=k(A\vec{v})\
\lambda_1\vec{u}=k\lambda_2\vec{v}\
\lambda_1k\vec{v}=k\lambda_2\vec{v}\
k(\lambda_2-\lambda_1)\vec{v}=0\
\lambda_2=\lambda_1,矛盾
$$
代码求解特征值和特征向量示例:
1 | import numpy as np |

这个结果与上面例子求解的结果对应.
矩阵相似型
如果矩阵A, B满足$A=P^{-1}BP$ ,则称A和B相似.
类比相似三角形. 矩阵相似本质上是从不同视角观察相同的内容.
如果P是一个坐标系,则A变换是在P坐标系下观察的B变换。
$$
A[\vec{x}]_p=P^{-1}BP[\vec{x}]_p
$$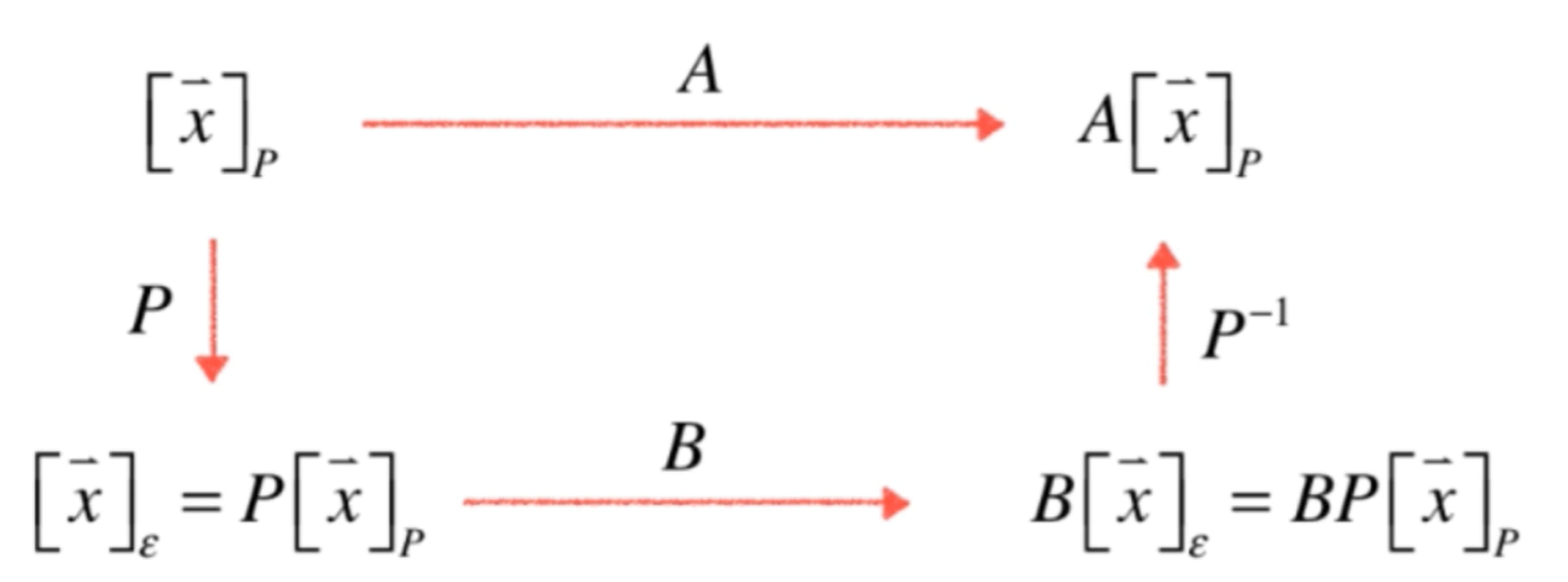
A和B本质是一个变换,只是观察的坐标系不同.
如果A和B相似,A和B的特征方程相同,特征值相同.
$$
det(A-\lambda I)=det(P^{-1}BP-\lambda I)=det(P^{-1}BP-\lambda P^{-1}P)\=
det(P^{-1}BP- P^{-1}\lambda P)\
=det(P^{-1}(B-\lambda I) P)\
=det(P^{-1})det(B-\lambda I)det(P)\
=det(B-\lambda I)det(P^{-1}P)\
=det(B-\lambda I)
$$
这就是特征值和特征向量真正表征的”特征“,当我们把矩阵看作一个变换,这个变换不管从哪个角度哪个坐标系去看,它们都具有相同的特征. 既然已经知道对于一个变换可以从不同的角度去看,我们肯定希望找到一个最好的角度,用这个最好的角度去看它使得计算变换容易.
矩阵对角化
在P坐标系下观察B看到的是A,那么就可以变换P坐标系相应A就产生了变化,希望找到一个最好的A使得B这个变化非常简单. 这就是矩阵对角化所做的任务.
如果A有n个线性无关的特征向量,则A和某个D相似.
$$
A=PDP^{-1}
$$
D变换是P坐标系下观察到的A.
那么一个A如何分解成$PDP^{-1}$ 的形式?答案藏在特征值和特征向量中.
一个矩阵A如果可以被对角化的话:
$$
D=\begin{pmatrix}
\lambda_1&0&…&0 \
0&\lambda_2&…&0 \
…&…&…&… \
0&0&…&\lambda_n \
\end{pmatrix} \quad P=(\vec{u_1} \quad \vec{u_2}\quad …\quad \vec{u_n})
$$
D主对角线上的元素是矩阵A的特征值,P是对应的特征向量组成的特征向量矩阵.
如果A有n个不相同的特征值,则A可以被对角化.
如果A没有n个不相同的特征值,A不一定不能被对角化.
对角化代码示例:
1 | import numpy as np |

对角化应用
求解矩阵的幂:
$$
A^2=PDP^{-1}PDP^{-1}=PD^2P^{-1}\
A^3=PDP^{-1}PDP^{-1}PDP^{-1}=PD^3P^{-1}\
A^n=PD^nP^{-1}\
D=\begin{pmatrix}
\lambda_1&0&…&0 \
0&\lambda_2&…&0 \
…&…&…&… \
0&0&…&\lambda_n \
\end{pmatrix} \quad D^2=\begin{pmatrix}
\lambda_1^2&0&…&0 \
0&\lambda_2^2&…&0 \
…&…&…&… \
0&0&…&\lambda_n^2 \
\end{pmatrix} \quad D^n=\begin{pmatrix}
\lambda_1^n&0&…&0 \
0&\lambda_2^n&…&0 \
…&…&…&… \
0&0&…&\lambda_n^n \
\end{pmatrix}
$$
这样计算矩阵的幂只用到了两次矩阵乘法.
为什么关心矩阵的幂?
大量问题的形式都跟矩阵的幂有关:
$$
\vec{u}_k=A^k\vec{u}_0
$$